Adrian Lita
Embedded Systems / Software Architect / Engineer
What I Did
- End-to-end design
- PCB design
- Firmware
- Testing
Technical Details
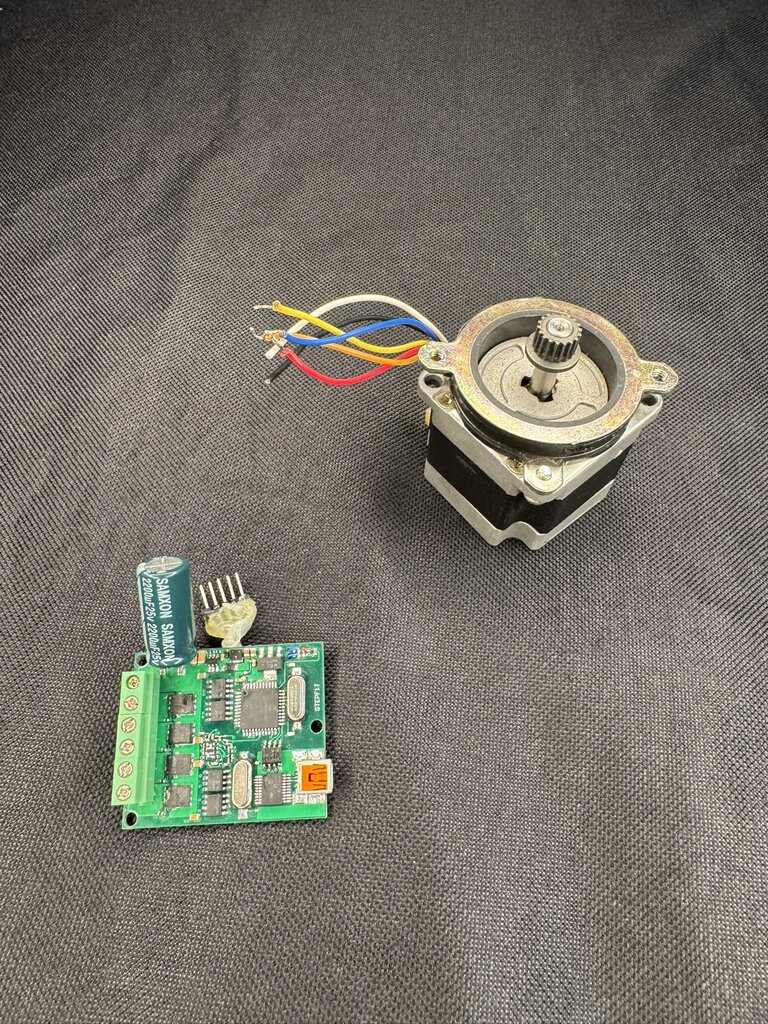
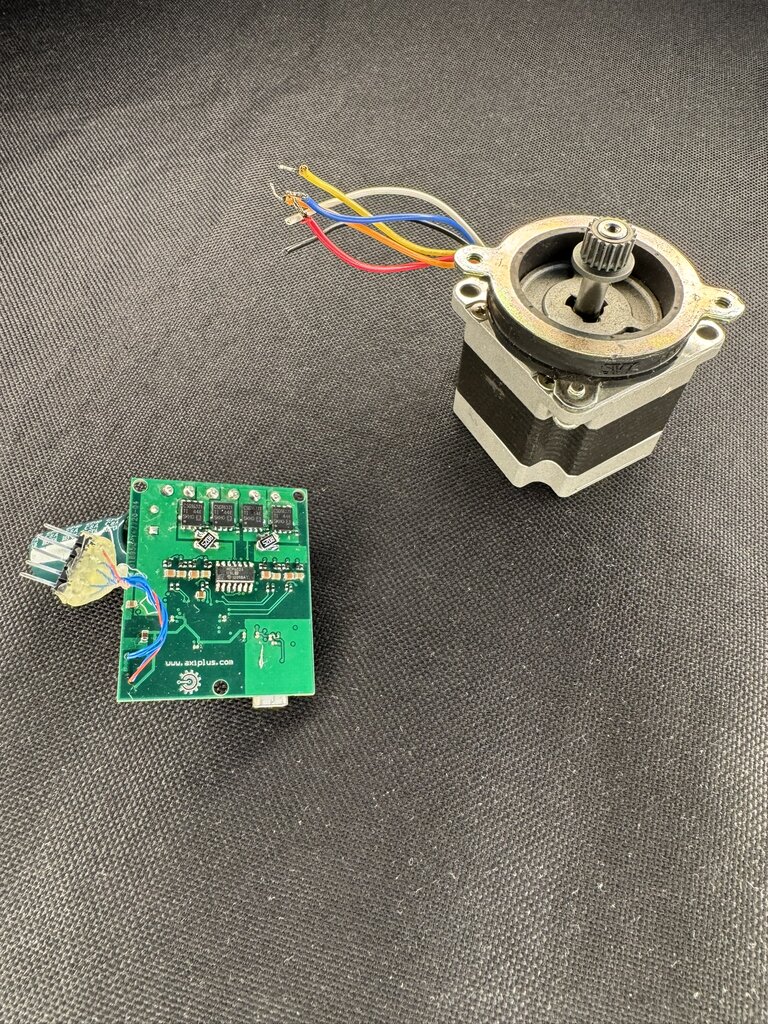
Stepper motor controller built with dsPIC33F microcontroller and 4 half-bridge + MOSFET driver stages. Its purpose is to drive bipolar stepper motors with high precision and torque for industrial automation applications. The controller implements up to 1/128 microstepping mode to achieve smooth motion and reduce resonance. Up to 1/1024 microstepping drive was possible with higher MIPS MCU. The controller supports various stepping modes including full-step, half-step, and microstepping, configurable via serial interface. It also supported position control through step and direction inputs, as well as absolute position requests via serial interface. A separate Windows-based GUI application was developed to configure parameters, monitor status, and command movements over serial communication (C#).
Technologies Used
- C / ASM
- C# - WPF for GUI
- dsPIC33F
- MPLAB X IDE
- Altium Designer
- Oscilloscope